
Adriano Fagiolini
Associate Professor in Automation (IINF-04/A)
Department of Engineering, University of Palermo (UNIPA), Italy
Program Coordinator for Automation and Systems
Engineering
(Bachelor's and
Master's Degrees) at UNIPA
Head of the Research Lab Mobile & Intelligent Robots @ Panormus Laboratory (MIRPAlab)
Local Contact Person
Italian University
Consortium for Transportation and Logistics (NITEL)
 In systems where many heterogeneous agents operate autonomously with
competing goals and without a centralized planner or global
information repository, safety and performance can only be
guaranteed by "social"
rules imposed on the individual agents' behaviors. The nature
of social rules is typically local, based on information made
available to an agent from a small number of its neighbors. Examples
of such regulated autonomy include car
mobility with traffic rules and logistic robots in
warehouses. Other systems, such as distributed power plants, are
emerging rapidly. In these systems, detecting whether any agent is
not
abiding by the rules is crucial for raising alerts and taking
appropriate countermeasures. However, the limited visibility due to
the local nature of information makes misbehavior detection
challenging for any single agent, and only through the exchange of
information between agents can sufficient clues be gathered to
arrive at a decision.
In systems where many heterogeneous agents operate autonomously with
competing goals and without a centralized planner or global
information repository, safety and performance can only be
guaranteed by "social"
rules imposed on the individual agents' behaviors. The nature
of social rules is typically local, based on information made
available to an agent from a small number of its neighbors. Examples
of such regulated autonomy include car
mobility with traffic rules and logistic robots in
warehouses. Other systems, such as distributed power plants, are
emerging rapidly. In these systems, detecting whether any agent is
not
abiding by the rules is crucial for raising alerts and taking
appropriate countermeasures. However, the limited visibility due to
the local nature of information makes misbehavior detection
challenging for any single agent, and only through the exchange of
information between agents can sufficient clues be gathered to
arrive at a decision.
 We consider threats posed to such a society by the misbehaviors of
its members, whether due to faults or malice, and the possibility to
detect
and isolate them through cooperation among peers. We discuss
intrusion detection algorithms that allow for the identification of
deviance from these rules, and algorithms to build a consensus
view on the environment and the integrity of peers, thereby
improving the overall security of the robotic society. After
providing a formal
framework for describing social rules that unifies various
applications, we study how to develop tools to automatically
generate local monitors' code.
We consider threats posed to such a society by the misbehaviors of
its members, whether due to faults or malice, and the possibility to
detect
and isolate them through cooperation among peers. We discuss
intrusion detection algorithms that allow for the identification of
deviance from these rules, and algorithms to build a consensus
view on the environment and the integrity of peers, thereby
improving the overall security of the robotic society. After
providing a formal
framework for describing social rules that unifies various
applications, we study how to develop tools to automatically
generate local monitors' code.
Selected Journal Papers
2024 The International Journal of Robotics Research
2015 Intl. J. of Distributed Sensor Networks

2016 IEEE Trans. Automatic Control
2013 Automatica
2010 IEEE Robotics & Automation Magazine
Other Cited Papers
- Fagiolini, A., Pellinacci, M., Valenti, G., Dini, G., Bicchi, A., "Consensus-based distributed intrusion detection for multi-robot systems", IEEE International Conference on Robotics and Automation, 2008 [Online]. Available: https://ieeexplore.ieee.org/document/4543196
- Fagiolini, A., Valenti, G., Pallottino, L., Dini, G., Bicchi, A., "Decentralized intrusion detection for secure cooperative multi-agent systems", IEEE Conference on Decision and Control, 2007 [Online]. Available: https://ieeexplore.ieee.org/document/4434902
- Manca, S., Fagiolini, A., Pallottino, L., "Decentralized coordination system for multiple AGVs in a structured environment", IFAC World Congress, 2011 [Online]. Available: https://www.sciencedirect.com/science/article/pii/S1474667016445660
- Fagiolini, A., Babboni, F., Bicchi, A., "Dynamic distributed intrusion detection for secure Multi-Robot systems", IEEE International Conference on Robotics and Automation, 2009 [Online]. Available: https://ieeexplore.ieee.org/document/5152608
- Fagiolini, A., Visibelli, E.M., Bicchi, A., "Logical consensus for distributed network agreement", IEEE Conference on Decision and Control, 2008 [Online]. Available: https://ieeexplore.ieee.org/document/4738964
- Fagiolini, A., Dini, G., Bicchi, A., "Distributed intrusion detection for the security of industrial cooperative robotic systems", IFAC World Congress, 2014 [Online]. Available: https://www.sciencedirect.com/science/article/pii/S1474667016428120
 Soft robots are considered cutting-edge technology, primarily
aimed
at enabling safe and effective physical interactions between
humans
and robots. These robots are characterized by their ability to
dynamically modulate elasticity during movement, which opens up
numerous opportunities in everyday life by facilitating human-like
abilities such as dexterity and robustness. To fully harness their
potential, it is essential to accurately determine their
stiffness,
a parameter that is inherently difficult to measure.
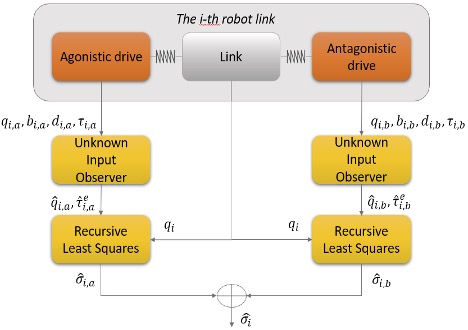
In this context, we first explore techniques for the estimation of
stiffness and flexibility torque in robot joints. This
challenge is approached from the motor side, treating the
flexibility torque signal as an unknown input in the linear motor
model. Unknown Input Observers (UIOs) are powerful tools used
here,
traditionally employed for detecting system failures and achieving
correct state estimation despite unknown inputs.
Soft robots are considered cutting-edge technology, primarily
aimed
at enabling safe and effective physical interactions between
humans
and robots. These robots are characterized by their ability to
dynamically modulate elasticity during movement, which opens up
numerous opportunities in everyday life by facilitating human-like
abilities such as dexterity and robustness. To fully harness their
potential, it is essential to accurately determine their
stiffness,
a parameter that is inherently difficult to measure.
In this context, we first explore techniques for the estimation of
stiffness and flexibility torque in robot joints. This
challenge is approached from the motor side, treating the
flexibility torque signal as an unknown input in the linear motor
model. Unknown Input Observers (UIOs) are powerful tools used
here,
traditionally employed for detecting system failures and achieving
correct state estimation despite unknown inputs.
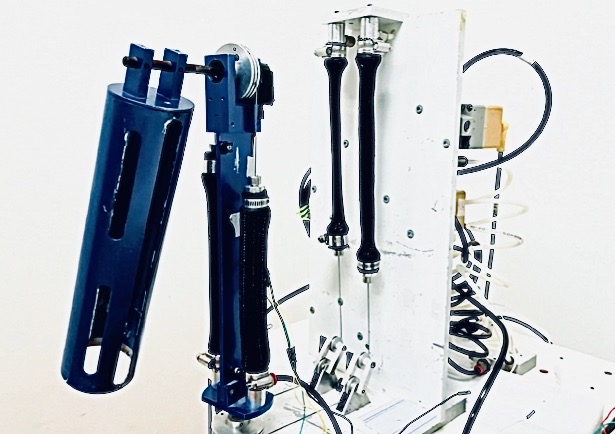 Among soft robots, articulated types feature concentrated
elasticity
at the joints, which are actuated by Variable Stiffness Actuators
(VSA). These devices are primarily driven by electric or pneumatic
mechanisms, enabling precise position and velocity control while
allowing for online compliance adjustments. In this realm, we
investigate innovative solutions for adaptive
control and learning for both articulated soft robots and continuum
soft robots, comparing them to traditional approaches.
Among soft robots, articulated types feature concentrated
elasticity
at the joints, which are actuated by Variable Stiffness Actuators
(VSA). These devices are primarily driven by electric or pneumatic
mechanisms, enabling precise position and velocity control while
allowing for online compliance adjustments. In this realm, we
investigate innovative solutions for adaptive
control and learning for both articulated soft robots and continuum
soft robots, comparing them to traditional approaches.
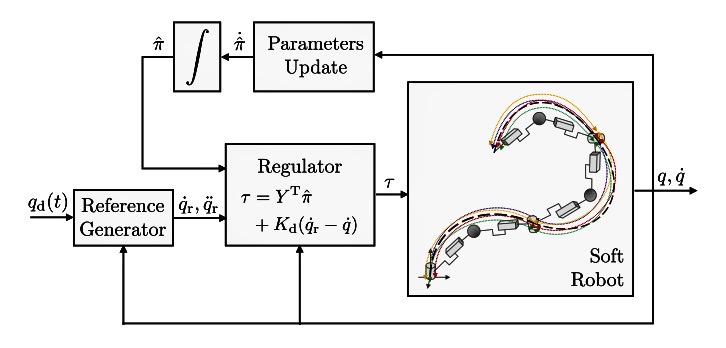 Continuum soft robots, with their inherent morphological
flexibility
and compliance, hold the promise of a disruptive impact across
various fields. However, they pose challenges in modeling systems
with theoretically infinite states. One possible strategy to
tackle
this complexity is to apply model-free machine learning
techniques,
treating the soft robot as a black box. Conversely, model-based
methods that account for the infinite nature of the problem remain
largely unfeasible.
In addressing these challenges, we propose new, singularity- and
discontinuity-free model parameterizations that link soft-bodied
and
rigid-bodied robots. This connection is crucial for developing
numerically stable and well-defined controllers across the entire
configuration space. We finally introduce robust
closed-loop position controllers for soft-bodied robots,
grounded in nonlinear adaptive control theory.
Continuum soft robots, with their inherent morphological
flexibility
and compliance, hold the promise of a disruptive impact across
various fields. However, they pose challenges in modeling systems
with theoretically infinite states. One possible strategy to
tackle
this complexity is to apply model-free machine learning
techniques,
treating the soft robot as a black box. Conversely, model-based
methods that account for the infinite nature of the problem remain
largely unfeasible.
In addressing these challenges, we propose new, singularity- and
discontinuity-free model parameterizations that link soft-bodied
and
rigid-bodied robots. This connection is crucial for developing
numerically stable and well-defined controllers across the entire
configuration space. We finally introduce robust
closed-loop position controllers for soft-bodied robots,
grounded in nonlinear adaptive control theory.
Selected Journal Papers

2020 Intl. J. of Robotics Research

2020 IEEE Robotics & Automation Letters
2021 IEEE Control Systems Letters

2022 IEEE Robotics & Automation Letters
2022 IEEE Control Systems Letters

2022 IEEE Robotics & Automation Letters
Other Recently Published Papers on the Topic
- Maja Trumić, Kosta Jovanović, Adriano Fagiolini, "Comparison of Model-Based Simultaneous Position and Stiffness Control Techniques for Pneumatic Soft Robots", International Conference on Robotics in Alpe-Adria Danube Region (RAAD), 2020 [Online]. Available: https://link.springer.com/chapter/10.1007/978-3-030-48989-2_24
 In the near future a great number of automotive applications will
become possible, by leveraging on denser and faster communication
networks also enabled by the 5G technology. Thanks to the
Vehicle-to-Everything (V2X) architecture, vehicles, passengers,
and
pedestrians will be able to cooperatively plan and optimize their
travel experience. They will be able to share evidence of possible
hazards, including unexpected traffic jams in tunnels, road
damages,
anomalous
behavior of human drivers and autonomous pilots, thus
improving
the overall safety of passengers and pedestrians.
In the near future a great number of automotive applications will
become possible, by leveraging on denser and faster communication
networks also enabled by the 5G technology. Thanks to the
Vehicle-to-Everything (V2X) architecture, vehicles, passengers,
and
pedestrians will be able to cooperatively plan and optimize their
travel experience. They will be able to share evidence of possible
hazards, including unexpected traffic jams in tunnels, road
damages,
anomalous
behavior of human drivers and autonomous pilots, thus
improving
the overall safety of passengers and pedestrians.
 In this scenario, the race towards (electric) vehicles with full
self-driving capacity has just begun. However, several obstacles
have
to be overcome before this technology goes mainstream to the
market,
including infrastructure modernization, legislations definition,
and
stronger guarantees on the ability of an autonomous vehicle to detect
and
react to uncertainties caused by unexpected changes in the
driving conditions. A notable example is the field of self-driving
vehicles, where the DARPA Grand Challenge and Urban Challenge have
pushed the robotics community to build autonomous cars for
unstructured or urban scenarios. We investigate on and propose fast
estimators) of the environmental conditions (road, wind,
etc.)
and suitable longitudinal
and lateral controllers that can promptly react and ensure
safety. We believe this research can strengthen the applicability
of
self-driving solutions and promote their usage in the society for
safer roads.
In this scenario, the race towards (electric) vehicles with full
self-driving capacity has just begun. However, several obstacles
have
to be overcome before this technology goes mainstream to the
market,
including infrastructure modernization, legislations definition,
and
stronger guarantees on the ability of an autonomous vehicle to detect
and
react to uncertainties caused by unexpected changes in the
driving conditions. A notable example is the field of self-driving
vehicles, where the DARPA Grand Challenge and Urban Challenge have
pushed the robotics community to build autonomous cars for
unstructured or urban scenarios. We investigate on and propose fast
estimators) of the environmental conditions (road, wind,
etc.)
and suitable longitudinal
and lateral controllers that can promptly react and ensure
safety. We believe this research can strengthen the applicability
of
self-driving solutions and promote their usage in the society for
safer roads.
Selected Journal Papers

2020 IEEE Trans. Vehicular Technology

2022 IEEE Trans. Control System Tech.

2023 Computer Communications
Other papers that are mostly cited
- Caporale, D., Fagiolini, A., Pallottino, L., Settimi, A., Biondo, A., Amerotti, F., Massa, F., De Caro, S., Corti, A., Venturini, L., "A Planning and Control System for Self-Driving Racing Vehicles", IEEE 4th International Forum on Research and Technology for Society and Industry (RTSI), 2018 [Online]. Available: https://ieeexplore.ieee.org/document/8548444
- Caporale, D., Settimi, A., Massa, F., Amerotti, F., Corti, A., Fagiolini, A., Guiggian, M., Bicchi, A., Pallottino, L., "Towards the design of robotic drivers for full-scale self-driving racing cars", International Conference on Robotics and Automation, 2019 [Online]. Available: https://ieeexplore.ieee.org/document/8793882

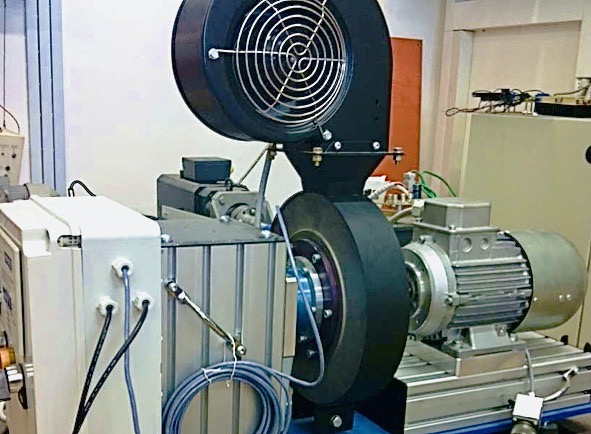
 Unmanned Aerial Vehicles (UAV) have been drawing increasing
attention
for more than two decades in various application fields, ranging
from
the industry to the military and from the service to the
entertainment. Due to their ability to reach places, particularly
those that are hardly accessible by land vehicles, UAVs are
convenient
tools for monitoring areas where natural disasters have just
occurred.
This is of high interest in the Pacific region, where remote
neighborhoods need to be rapidly checked after cyclones or floods.
The
U.N. Food and Agriculture Organization (FAO) has launched in the
Philippines a drone initiative to assess where agricultural land
is
at
most risk of natural disasters and how to rapidly evaluate damages
after they occur. It is strongly believed that the adoption of UAV
platforms can significantly enhance risk and damage assessments,
but
also revolutionize the way to prepare for and respond to
disasters.
Using this kind of aircraft in hostile conditions, including
strong
wind gusts, is still an open problem. The nonlinearity of the
system
model, along with its underactuation, must taken into account, as
they
otherwise negatively affect on the mission performance, which is
particularly true for lightweight low-cost quadrotors.
Unmanned Aerial Vehicles (UAV) have been drawing increasing
attention
for more than two decades in various application fields, ranging
from
the industry to the military and from the service to the
entertainment. Due to their ability to reach places, particularly
those that are hardly accessible by land vehicles, UAVs are
convenient
tools for monitoring areas where natural disasters have just
occurred.
This is of high interest in the Pacific region, where remote
neighborhoods need to be rapidly checked after cyclones or floods.
The
U.N. Food and Agriculture Organization (FAO) has launched in the
Philippines a drone initiative to assess where agricultural land
is
at
most risk of natural disasters and how to rapidly evaluate damages
after they occur. It is strongly believed that the adoption of UAV
platforms can significantly enhance risk and damage assessments,
but
also revolutionize the way to prepare for and respond to
disasters.
Using this kind of aircraft in hostile conditions, including
strong
wind gusts, is still an open problem. The nonlinearity of the
system
model, along with its underactuation, must taken into account, as
they
otherwise negatively affect on the mission performance, which is
particularly true for lightweight low-cost quadrotors.
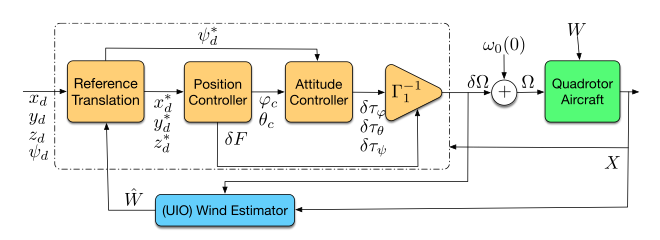 In this context, we study solutions that are applicable to
low-cost
multirotor aircraft, which allows avoiding direct wind speed
measurement via anemometers. We seek solutions with the appealing
features of being simple, having low computation cost, being able
to
obtain a fast response to wind gusts, and implementable on
virtually
all aircraft systems, as a stand-alone solution or an extension
plugin
for existing controllers. Along this line, we propose an
innovative
approach where wind disturbance is modeled as an unknown exogenous
input and then it is estimated via an Unknown
Input-State
Observer (UIO). In order to further improve the promptness
and
efficacy of the controlled aircraft, we describe alternative
solutions
using Nonlinear
UIOs and model-decoupling,
ESO-based techniques which are also robust to model
uncertainty.
In this context, we study solutions that are applicable to
low-cost
multirotor aircraft, which allows avoiding direct wind speed
measurement via anemometers. We seek solutions with the appealing
features of being simple, having low computation cost, being able
to
obtain a fast response to wind gusts, and implementable on
virtually
all aircraft systems, as a stand-alone solution or an extension
plugin
for existing controllers. Along this line, we propose an
innovative
approach where wind disturbance is modeled as an unknown exogenous
input and then it is estimated via an Unknown
Input-State
Observer (UIO). In order to further improve the promptness
and
efficacy of the controlled aircraft, we describe alternative
solutions
using Nonlinear
UIOs and model-decoupling,
ESO-based techniques which are also robust to model
uncertainty.
Selected Journal Papers

2021 Control Engineering Practice
2021 Intl. J. of Advanced Robotic Systems
2021 The Computer Journal
2021 IEEE Access
2022 IEEE Access
2023 IEEE Access
 A problem of great interest in real applications using large power
machines and motors is reducing the number of sensors needed for
processing a given control law. Motion control of systems with
induction motors (IM) without speed sensor (sensorless) has been
longly addressed by many authors, since these systems often
operate
in
unaccessible environments. A crucial problem to solve for the
implementation of sensorless control laws is the determination of
both
the rotor flux vector and the speed.
A problem of great interest in real applications using large power
machines and motors is reducing the number of sensors needed for
processing a given control law. Motion control of systems with
induction motors (IM) without speed sensor (sensorless) has been
longly addressed by many authors, since these systems often
operate
in
unaccessible environments. A crucial problem to solve for the
implementation of sensorless control laws is the determination of
both
the rotor flux vector and the speed.
We investigate on new solutions to estimate the state of these machines and to control them despite the uncertainties of the model, with a special focus on low-speed operating conditions and with varying load conditions. As is well known, the observability property of the model is crucial for the existence of state observers, a property that is known to be lost at zero rotor speed. We provide a new approach to estimate the speed of an IM by using an extended Kalman filter (EKF), which remains valid at very low rotor speed. Also, we reformulate the motor model by using complex-valued variables, which allows reducing the size of the model as well as simplifying the observability property. This enables the derivation of Extended Complex-valued Kalman Filters (ECKF) whose main feature is a smaller required computational time.
Selected Journal Papers
2014 Control Engineering Practice
2015 IEEE Trans. on Industrial Electronics
2022 Electronics

2023 IEEE Access
Other recently published papers on the topic
- H. K. Mudaliar, D. M. Kumar, M. Cirrincione, M. di Benedetto and A. Fagiolini, "Improving the speed estimation by load torque estimation in induction motor drives: an MRAS and NUIO approach", IEEE 12th Energy Conversion Congress & Exposition - Asia (ECCE-Asia), 2021 [Online]. Available: https://ieeexplore.ieee.org/abstract/document/9479249
- D. M. Kumar, M. Cirrincione, H. K. Mudaliar, M. di Benedetto, A. Lidozzi and A. Fagiolin, "Development of a Fractional PI controller in an FPGA environment for a Robust High-Performance PMSM Electrical Drive", IEEE 12th Energy Conversion Congress & Exposition - Asia (ECCE-Asia), 2021 [Online]. Available: https://ieeexplore.ieee.org/abstract/document/9479450
- F. Alonge, F. D'Ippolito, A. Fagiolini, G. Garraffa, F. M. Raimondi and A. Sferlazza, "Tuning of Extended Kalman Filters for Sensorless Motion Control with Induction Motor", IEEE International Conference of Electrical and Electronic Technologies for Automotive , 2019 [Online]. Available: https://ieeexplore.ieee.org/abstract/document/8804540